





Os fabricantes de automóveis foram pegos na crise da escassez de componentes eletrônicos, embora a tendência de carros inteligentes seja irresistível. Como a evidência mais instantânea e impressionante de inteligência para os usuários, o sistema PEPS (Passive Entry and Passive Start) não é mais um recurso de alto perfil apenas para carros de última geração. Foi introduzido em modelos intermediários ou mesmo econômicos por muitos fabricantes de automóveis, em particular marcas emergentes. No mercado da China, onde as vendas de veículos elétricos testemunham um crescimento de mais de 100% no primeiro semestre de 2022, grandes fabricantes de carros elétricos, como BYD, GAC Aion, Geely, Nio, Xpeng e Li Auto, basicamente equiparam todos os modelos com PEPS .

Enquanto essa ECU silenciosamente atordoa nós motoristas, já pensamos em sondar o rastro de sua criação e a perspectiva de seu futuro? Vamos pegar a estrada.
O PEPS oferece aos motoristas a experiência de entrar com segurança no carro sem a atividade de desbloqueio manual. O motor e o sistema HVAC do carro podem ser iniciados remotamente antes que o motorista ou os passageiros entrem no carro. Enquanto todos os passageiros saem do carro, o PEPS trava automaticamente o carro. Desta forma, os usuários de automóveis desfrutam da conveniência da entrada passiva com segurança garantida. Deve ser por isso que o nomeamos com a palavra “passivo”.
Ontem: RKE e PKE
Atualmente, as principais soluções de PEPS integram tecnologias sem fio como Bluetooth Low Energy (BLE), NFC, RFID (Alta Frequência e Baixa Frequência) etc. Bem, como elas funcionam? Seria difícil digerir se contarmos a história a partir de hoje. Então, por que não voltamos para ontem?
No final da década de 1990, alguns modelos de carros de última geração introduziram um sistema de entrada remota sem chave (RKE) uma evolução em relação à solução anterior IMMO (imobilizador) baseada em RFID de baixa frequência (125 KHz). Como antecessor do PEPS, o RKE possui o chaveiro para transmitir sinais UHF (ultra-alta frequência) para um receptor RF conectado ao BCM (módulo de controle da carroceria) do carro para verificar a identidade do usuário. Assim que o ID for verificado, o sistema executará uma ação de abrir/fechar a porta acionada pelo BCM. Tal mecanismo de verificação unidirecional, como mostrado na Figura 1, pode ser interpretado como uma cifra avançada em um filme de espionagem. Quando um agente secreto visitante chega a um local de reunião, ele ou ela precisa falar ou mostrar tal cifra. Se a cifra estiver correta, ele poderá entrar. A desvantagem desse mecanismo é que, uma vez que o inimigo se infiltrou e obteve a cifra,
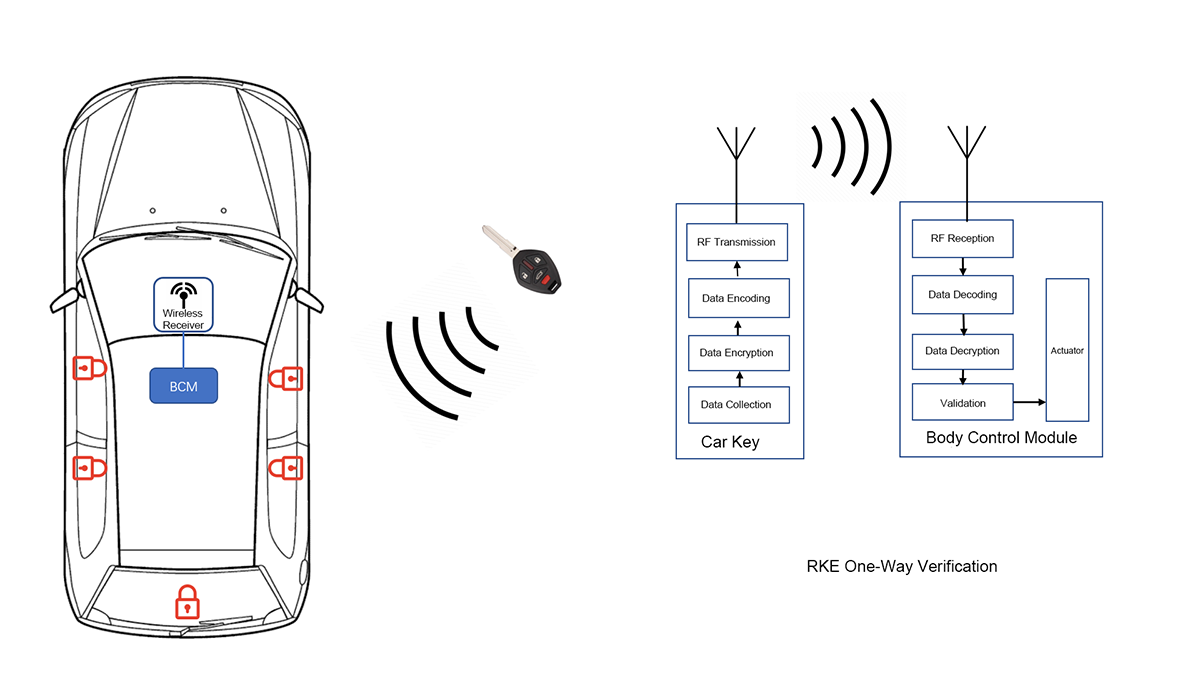
Figura 1. Mecanismo de Trabalho do RKE
A solução RKE adota bandas de frequência de 315 MHz (nos EUA, China e Japão etc.), 433,92 MHz (na Europa, China) e 868 MHz (na Europa). ), enquanto o Japão adota o modo FSK (frequency shift keying) Fornecedores de IC como Silicon Labs, Maxim, Microchip e NXP etc.
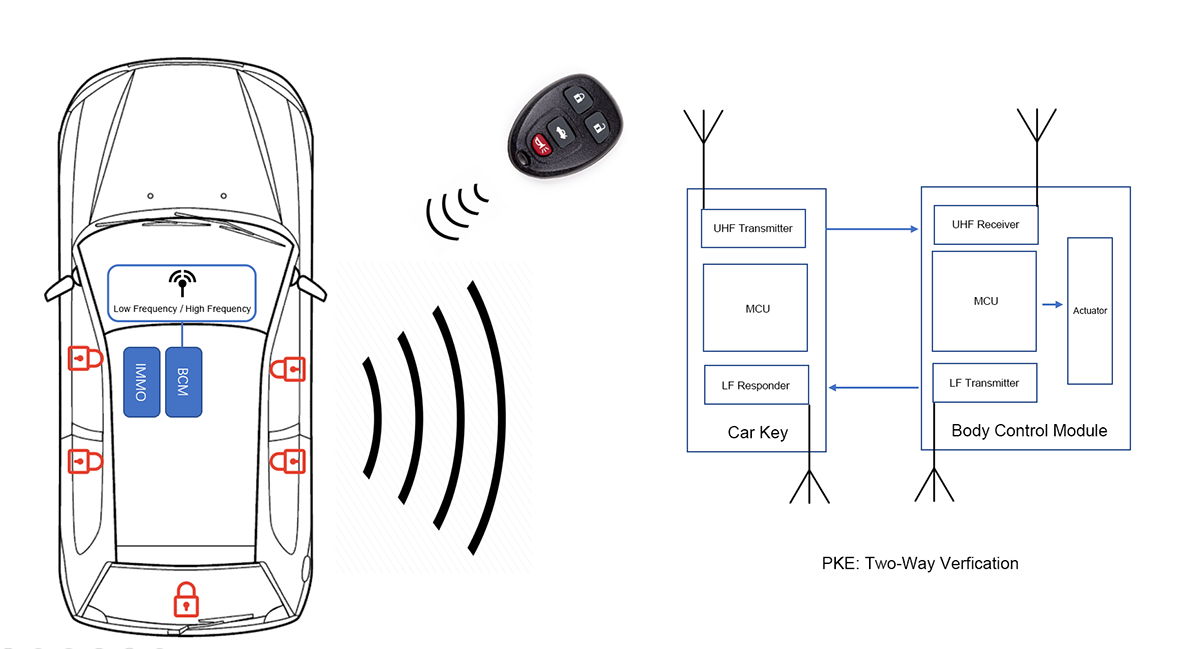
Figura 2. Mecanismo de Trabalho do PKE
Hoje: Bluetooth PEPS é mainstream
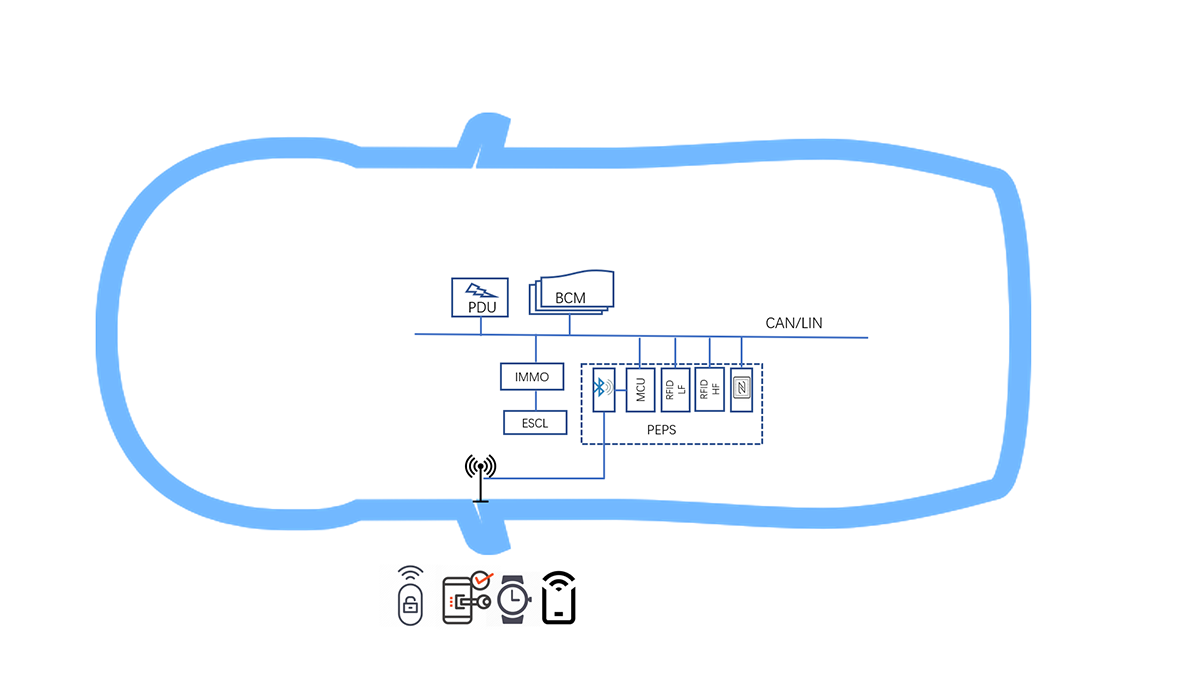
Figura 3. Esquema Bluetooth PEPS de nível de entrada (Estação Única RSSI)
Tecnologia AOA para realizar PEPS mainstream
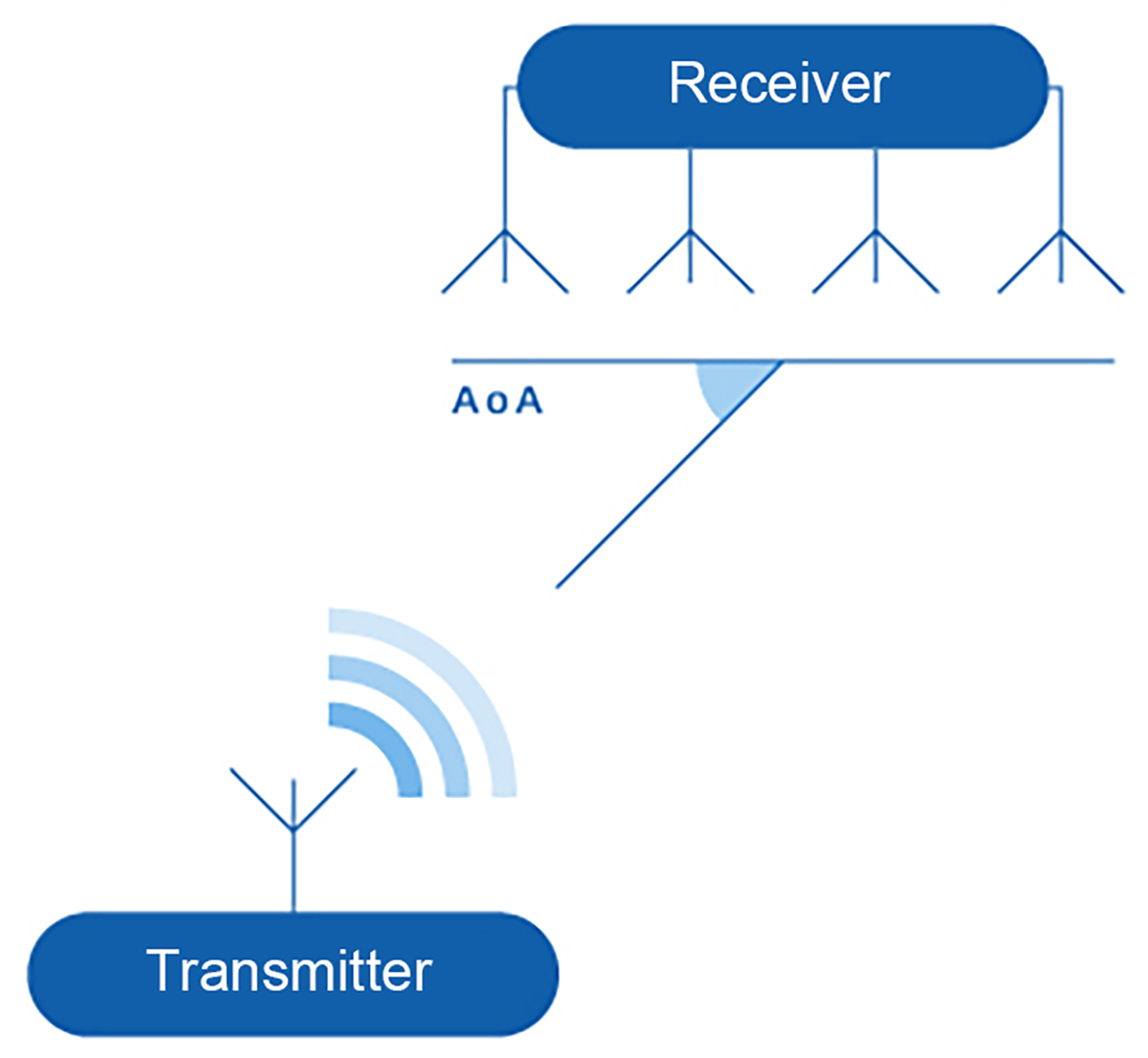
Figura 4. Posicionamento Bluetooth AOA
Obviamente, para melhorar o nível de precisão do posicionamento, precisamos de suporte a várias estações base Bluetooth com algoritmo AoA. Assim, em modelos de nível intermediário, os fabricantes de automóveis optam por implantar o Bluetooth PEPS multiponto, conforme ilustrado na Figura 5, embora o número exato de estações base e o padrão de layout variem até certo ponto para diferentes modelos de carros.
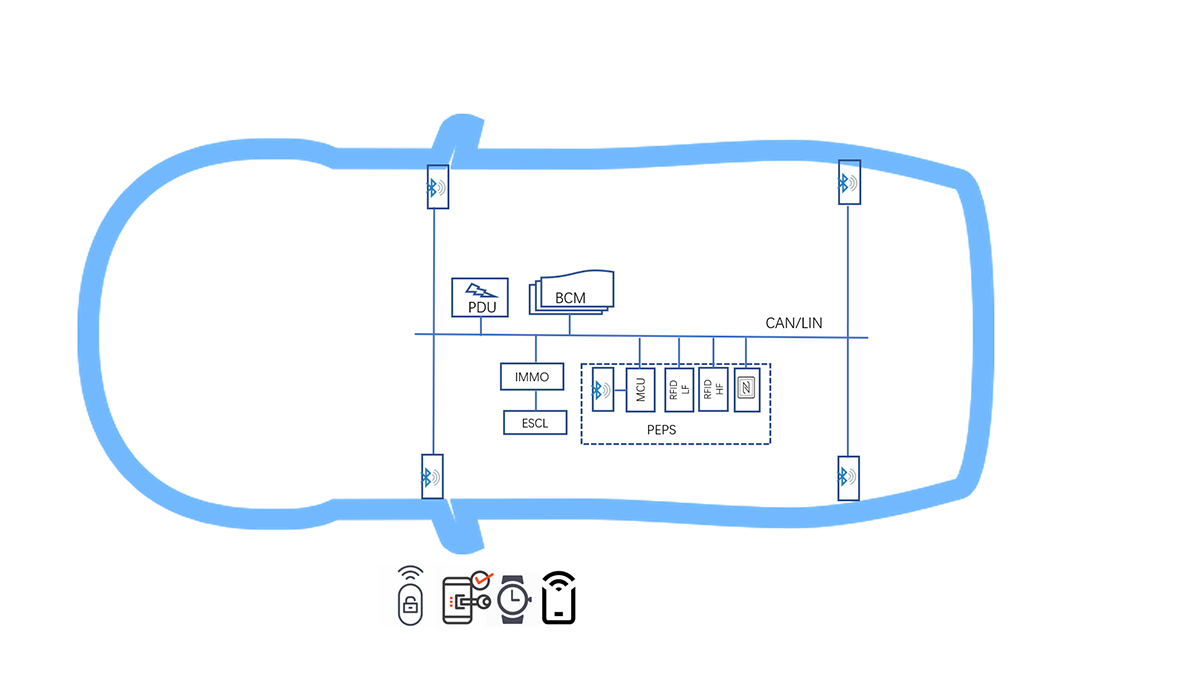
Figura 5.Solução Mainstream Bluetooth PEPS (Posicionamento AoA)
Os SoCs mais adotados na arena Bluetooth PEPS incluem TI CC2640, Silicon Labs EFR32BG22 e NXP KW36 etc.
Amanhã: UWB é Promissor O
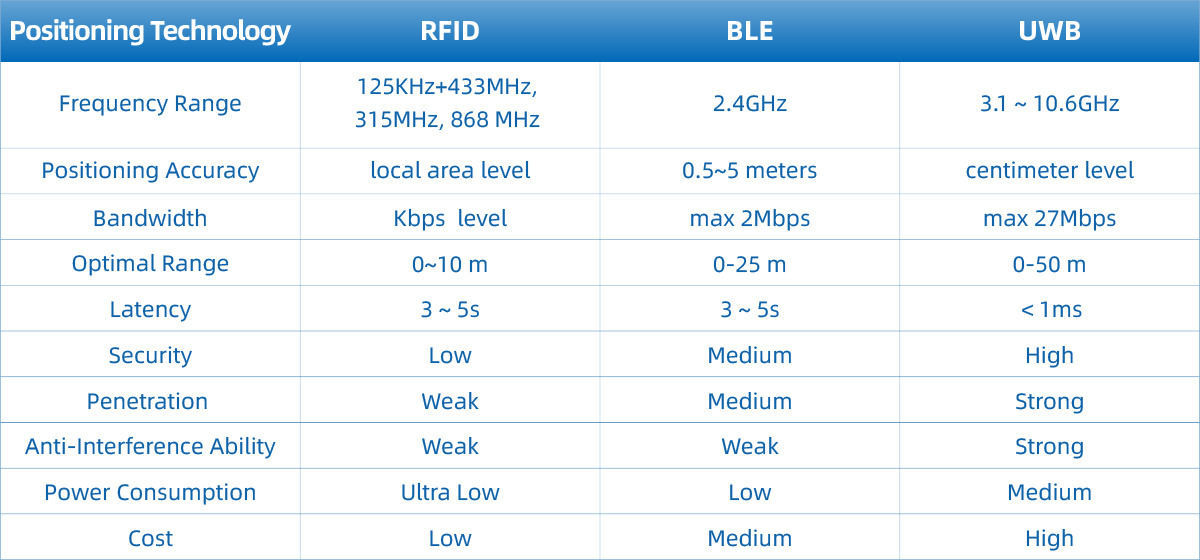
Tabela 1. Comparação das Tecnologias de Posicionamento PEPS
Algoritmos de Posicionamento para UWB
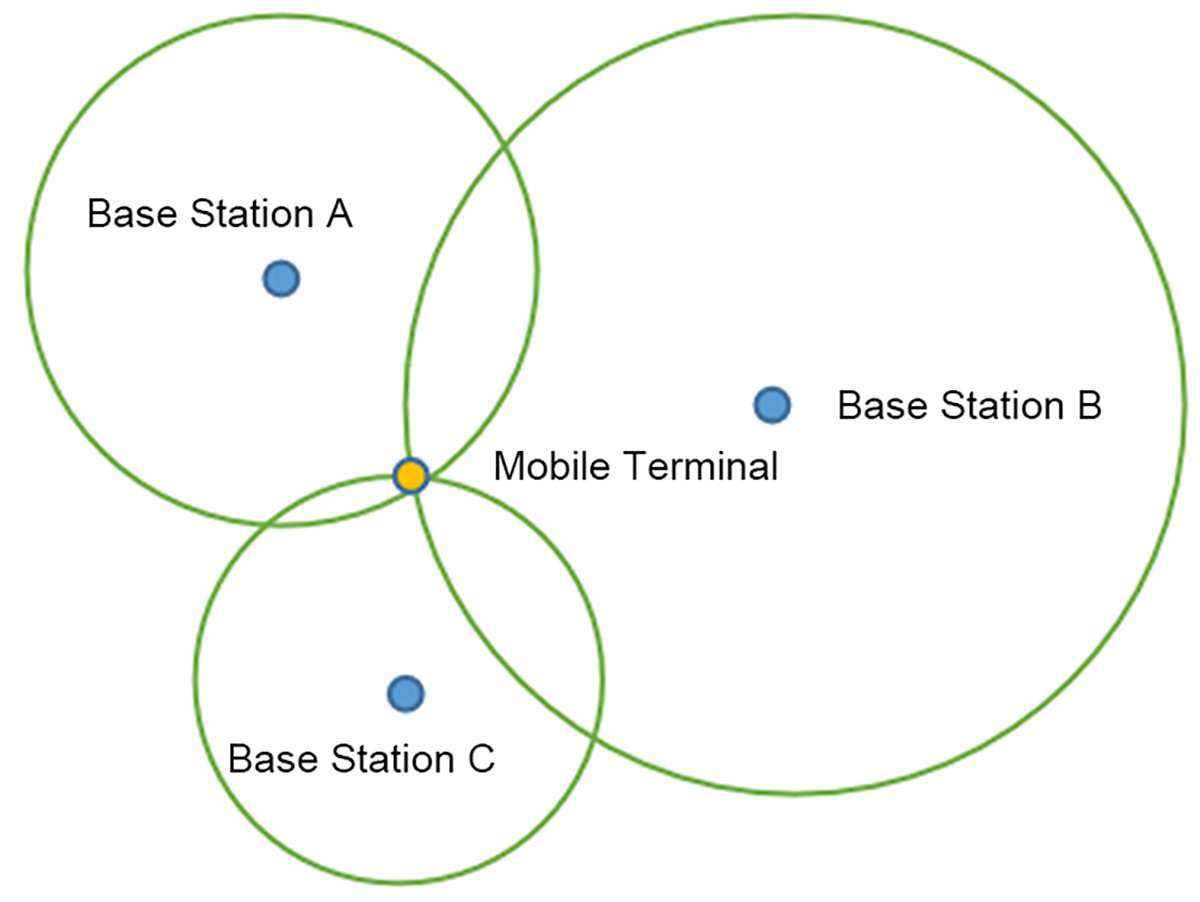
Figura 6. Algoritmo de Posicionamento TOA (Método de Posicionamento Circular)
Uma melhoria em relação ao TOA, o TDOA realiza sincronização precisa entre estações base, o que é fácil de realizar. Não há sincronização de tempo entre o terminal móvel e as estações base, conforme mostrado na Figura 7. Primeiro calcule a diferença de distância entre o terminal móvel e a estação base A e uma entre ele e a estação base B. O terminal móvel deve estar em uma hipérbole com a estação base A e a estação base B como focos. Outro conjunto de hipérboles pode ser obtido pelas diferenças de distância entre o terminal móvel e a estação base A e a estação base C, e a interseção das hipérboles é a posição do terminal móvel. No alcance do espaço do veículo, a influência do multipercurso, ruído, etc. também pode ser reduzida por meio da diferença de distância.
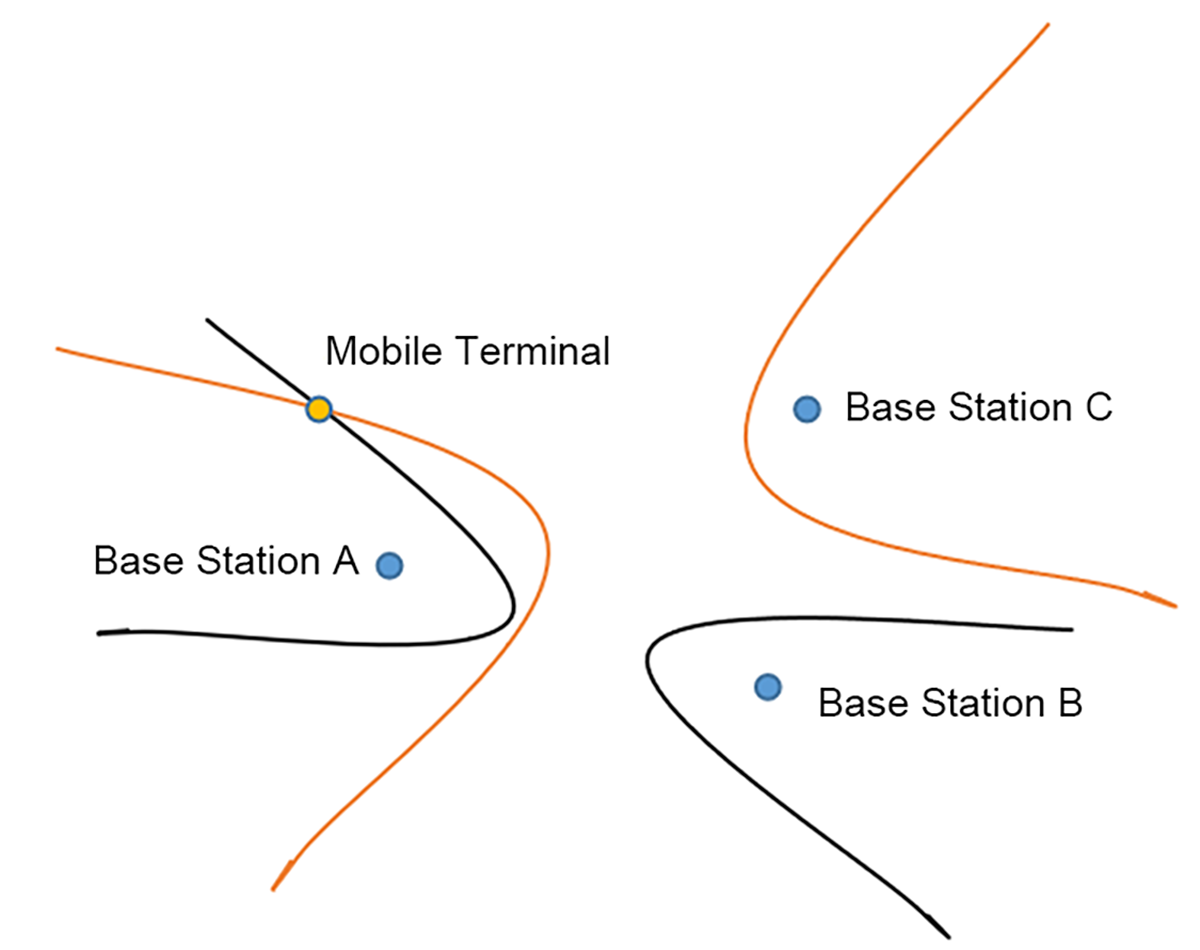
Figura 7 Algoritmo de Posicionamento TDOA
O posicionamento AOA calcula o ângulo de chegada com base no princípio da diferença de fase e precisa apenas de duas estações base para obter o posicionamento. Devido à questão da resolução angular, a precisão de posicionamento diminui com o aumento da distância da estação base, sendo mais utilizada para posicionamento em distâncias curtas e médias.
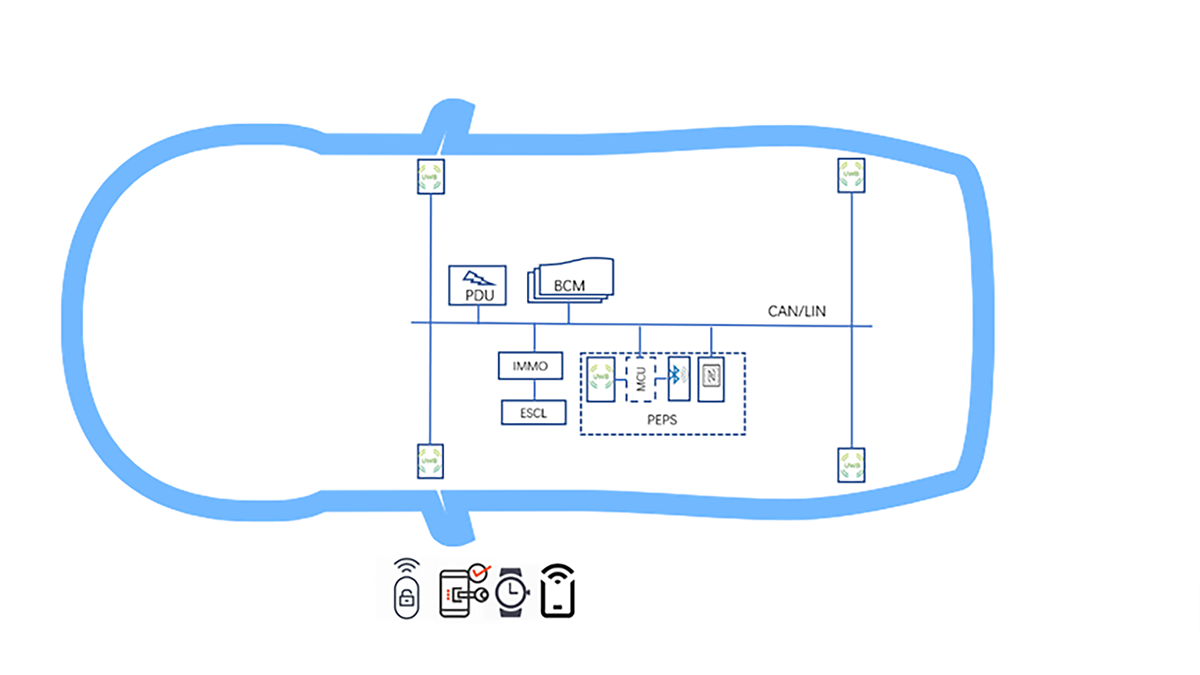
Figura 8. Arquitetura de Implementação do UWB PEPS Especificado pelo CCC 3.0
No campo de chips UWB, os fabricantes maduros atualmente reconhecidos são Apple, NXP Trimension e QORVO Decawave. Entre seus ICs lançados, apenas o NXP Trimension NCJ29D5 atende aos requisitos dos regulamentos do veículo.
Extensão: Bio-Radar
A experiência do UWB PEPS para motoristas é íntima e segura. No entanto, os passageiros no carro sentem o mesmo? Geralmente sim, mas não em alguns casos especiais. Às vezes é duro para eles. Por exemplo, se o motorista sair do carro, as portas travam automaticamente. Um bebê ou um animal de estimação doce foi deixado acidentalmente no carro. O carro deve enviar alarme para o motorista? Absolutamente necessário! Felizmente, isso pode ser bem abordado pelo UWB.
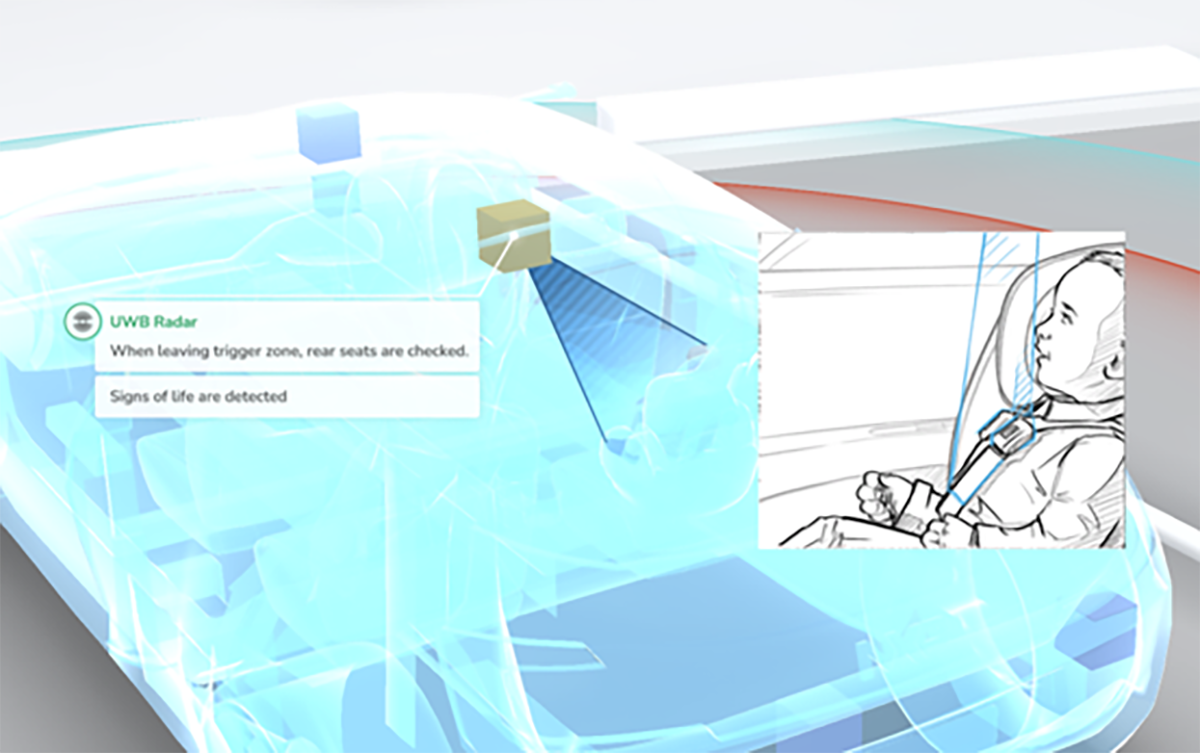
Figura 9. Detecção de vida com UWB Bio-Radar
Tronco: Kick-to-Open
Além da detecção de vida no veículo, com base no recurso de percepção de movimento do radar UWB, o UWB também possui uma aplicação inteligente de pisar para abrir o porta-malas. Quando a identidade do motorista atinge a parte traseira do veículo, o radar UWB pode detectar com precisão a ação de pisar, abrindo automaticamente o porta-malas do veículo.
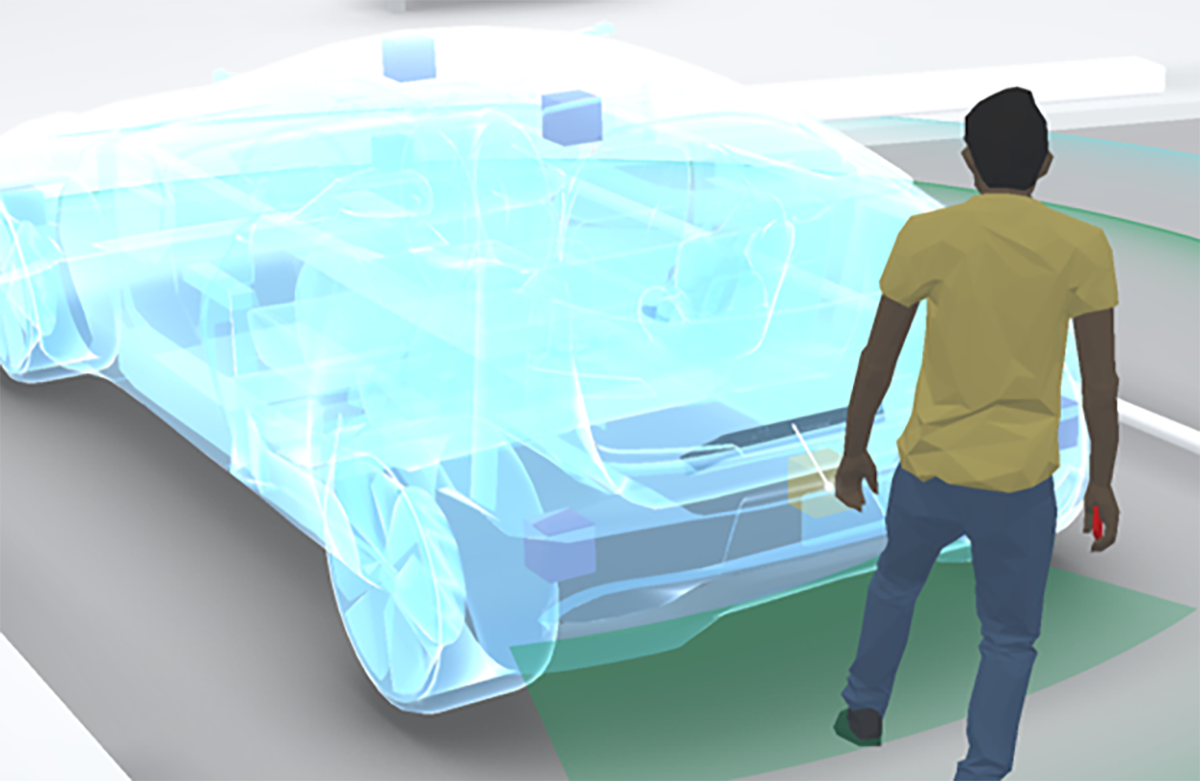
Figura 10. UWB permite solução Kick-to-Open
As duas funções de radar UWB descritas acima, incluindo o bio-radar UWB e o radar de chute UWB, não requerem hardware adicional, mas são implementadas apenas pela reutilização do hardware UWB do lado do veículo sem adicionar custos adicionais de hardware. Também podemos considerá-los como parte da futura funcionalidade UWB PEPS.
Estacionamento automatizado com manobrista habilitado para UWB
AVP (Automated Valet Parking) é a função de estacionamento autônomo com manobrista. É conhecida como a tecnologia de condução autônoma de nível L4 que fornece aos usuários "liberdade na última milha". Atualmente, é o cenário de aplicação de direção autônoma mais promissor para comercialização, conforme mostrado na Figura 11. Outro grande benefício da implementação de uma experiência PEPS com UWB é que ela fornece as condições necessárias e suficientes para implementar o AVP na lateral do carro.
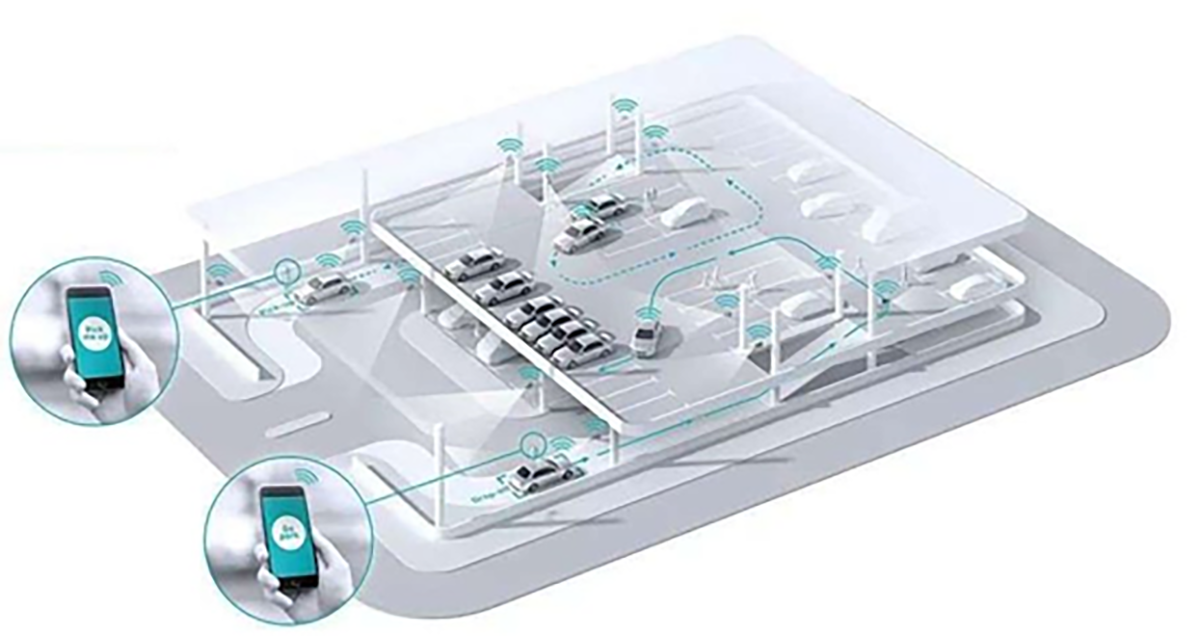
Figura 11 Sistema de estacionamento automatizado com manobrista
A Figura 12 mostra um esquema de layout de nó UWB de extremidade de veículo viável. Um total de quatro nós UWB PEPS são colocados nos faróis e lanternas traseiras, e um quinto nó UWB PEPS+AVP é colocado no teto. O quinto nó pode receber o sinal UWB no carro e o sinal UWB fora do carro, e também é o nó chave para realizar a função AVP.
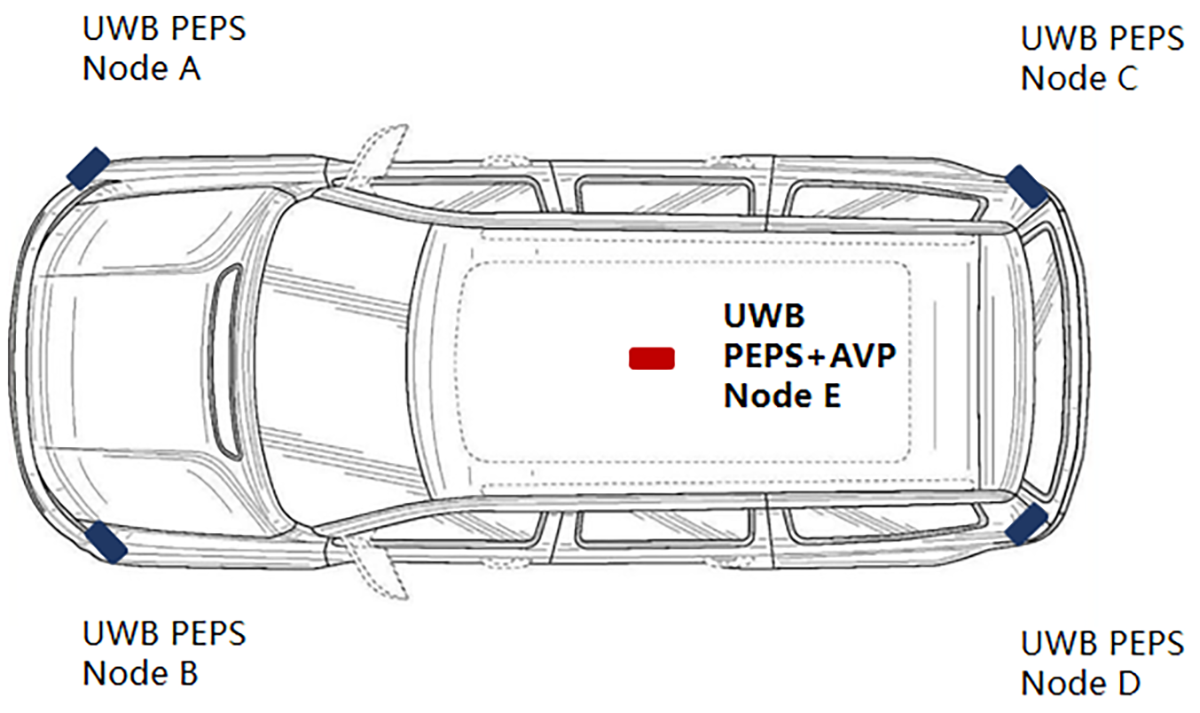
Figura 12 Arquitetura do PEPS + AVP
No modo PEPS, o quinto nó UWB coopera com os outros quatro nós UWB para concluir a medição da posição da chave inteligente e envia as informações de alcance ao controlador de domínio do corpo (BCM) para concluir o cálculo da posição da chave inteligente. chave, para decidir o desbloqueio de acompanhamento e iniciar as operações.
Conclusão
Shenzhen HQ: Room 503, Podium Building No. A-12, Shenzhen Bay Science and Technology Ecological Park, Nanshan District, Shenzhen, Guangdong, China, 518063
Chengdu Branch: N2-1604, Global Center, North No. 1700, Tianfu Avenue, Hi-Tech District, Chengdu, Sichuan, China
Tel : +86 (0)28-86925399
O email : info@szrfstar.com
Teams : Sunny Li
Whatsapp : +8618190842785














